|
XDL Manual (piXoneer XDL Tutorial)
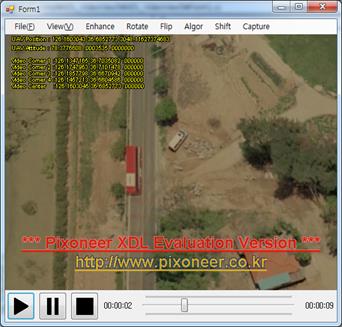
NXVideoView를 활용하여 동영상 플레이어를 구현해 봅니다. UAV에서 촬영하되 동영상에 Frame정보와 촬영 기하에 대한 센서 모델 정보가 함께 스트리밍되는 MPEG2TS파일을 읽어 들여 UAV 비행체의 위치, 자세, 그리고 동영상의 Foot Print를 실시간으로 도시하는 기능을 구현해봅니다.
2017. 01. 수정 2019. 02.
|
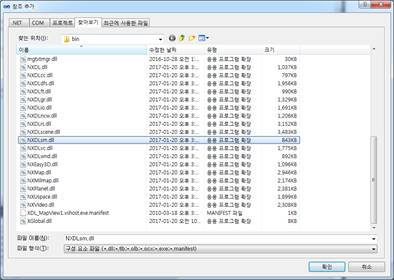
1 사용하기본 튜터리얼을 공부하기 전에 먼저 “XDL VideoView 활용 네번째”를 먼저 선행하시기 바랍니다. XDL VideoView 활용 네번째에 이어서 진행합니다.1.1 참조항목 추가1.1.1 참조 항목을 통해 “C:\Pixoneer\XDL1.2\bin\” 에 존재하는 “XDLsm.dll”을 추가한다.
1.1.2 센서모델 인터페이스를 위해 NSM, 화면 텍스트 프린트를 위해NGR Namespace를 추가한다.
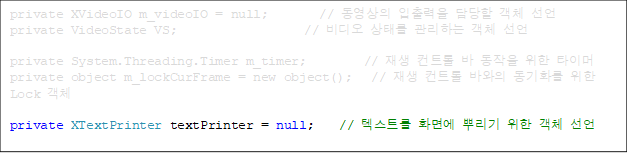
1.2 센서 모델 파라미터 얻어오기1.2.1 센서 정보를 도시하기 위해 XTextPrinter를 선언한다.
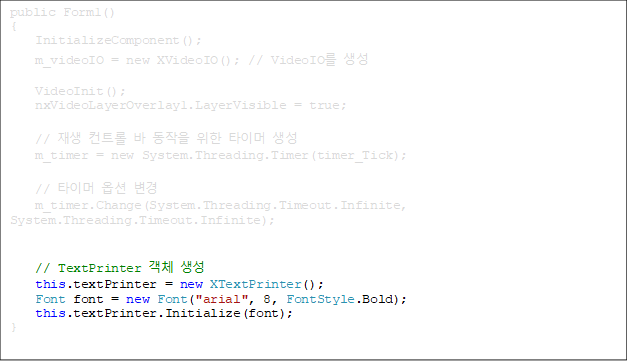
1.2.2 Form1생성자에 XTextPrinter의 객체 생성 및 초기화를 수행한다.
1.2.3 nxVideoLayerOverlay1_OnOrthoRender함수에서 센서모델 정보를 추출한다.
1.2.4 [F5]키를 눌러 프로그램을 실행시킨다. 화면 좌 상단에 센서 정보 및 동영상의 FootPrint가 도시됨을 알 수 있다. 이 기능은 동영상이 MPEG2TS인 파일이 스트리밍으로 MISB표준 프로토콜로 메타데이터를 포함하고 있을 경우에만 가능하다. 특히 군용 무인기의 경우 NATO STANAG 표준으로 정의된 동영상 표준 포맷의 경우 지원이 가능하다.
|

![// PTS값을 얻기 위해 OnOrthoRender함수를 이용한다.
private bool nxVideoLayerOverlay1_OnOrthoRender(NXVideoLayer sender, NXVideoDrawArgs DrawArgs)
{
try
{
lock (m_lockCurFrame)
{
// 현재 재생중인 화면의 PTS(Presentation TimeStamp) 값 얻어오기
Int64 pts = DrawArgs.PTS;
// PTS를 이용한 현재 재생중인 화면의 프레임 위치를 얻어오기
VS.currentFrame = VS.videoChannel.PtsToFrameNumber(pts);
if (VS.currentFrame >= VS.totalFrame) VS.currentFrame = VS.totalFrame;
if (VS.currentFrame < 0) VS.currentFrame = 0;
// 센서 모델링 정보 얻기
XFrameSensorParams sensor_params
= DrawArgs.FrameSensor.GetModelParams();
if (sensor_params != null)
{
XVertex3d[] ptArr = new XVertex3d[5] { new XVertex3d(),
new XVertex3d(), new XVertex3d(), new XVertex3d(),
new XVertex3d() };
double fy = (double)DrawArgs.MetadFrame.FrameHeight / 2.0 /
Math.Tan(Math.PI * 31 / 180.0);
sensor_params.FocalLength = fy;
XFrameSensor sensor = new XFrameSensor();
sensor.SetParamsEarth(sensor_params);
// 비디오 영상의 모서리 1
sensor.ImageToWorldG(new XVertex2d(0, 0), 0.0, out ptArr[0]);
// 비디오 영상의 모서리 2
sensor.ImageToWorldG(new XVertex2d(0, sensor_params.Height - 1),
0.0, out ptArr[1]);
// 비디오 영상의 모서리 3
sensor.ImageToWorldG(new XVertex2d(sensor_params.Width - 1,
sensor_params.Height - 1), 0.0, out ptArr[2]);
// 비디오 영상의 모서리 4
sensor.ImageToWorldG(new XVertex2d(sensor_params.Width - 1, 0),
0.0, out ptArr[3]);
// 비디오 영상의 모서리 센터
sensor.ImageToWorldG(new XVertex2d(sensor_params.Width / 2,
sensor_params.Height / 2), 0.0, out ptArr[4]);
// UAV 촬영 센서의 자세를 얻는다.
XVertex3d uav = DrawArgs.FrameSensor.GetModelParams().SensorPos;
double yaw = DrawArgs.FrameSensor.GetModelParams().SensorYaw.deg;
double pitch =
DrawArgs.FrameSensor.GetModelParams().SensorPitch.deg;
double roll =
DrawArgs.FrameSensor.GetModelParams().SensorRoll.deg;
// UAV 위치를 ECEF좌표계로부터 Geographic Coordiante로 변환시킨다.
XGeoPoint geouav = XGeoPoint.FromEcr(uav.x, uav.y, uav.z);
uav.x = geouav.lond;
uav.y = geouav.latd;
uav.z = geouav.hgt;
// UAV의 위치와 센서의 자세, 그리고 비디오 Foot Print를 화면에 도시한다.
string text = string.Empty;
text = string.Format("UAV Position : {0:000.0000000}
{1:00.0000000} {2}", uav.x, uav.y, uav.z);
textPrinter.Print(text, new XVertex3d(10, 14, 0),
eTextAlign.Align_Left, Color.Yellow, true, Color.Black);
text = string.Format("UAV Attitude : {0:###.0000000}
{1:###.0000000} {2:###.0000000 }", yaw, pitch, roll);
textPrinter.Print(text, new XVertex3d(10, 28, 0),
eTextAlign.Align_Left, Color.Yellow, true, Color.Black);
for (int i = 0; i < 4; i++)
{
text = string.Format("Video Corner {0} :{1:000.0000000}
{2:00.0000000} {3:###.000000}", i+1, ptArr[i].x, ptArr[i].y,
ptArr[i].z);
textPrinter.Print(text, new XVertex3d(10, 38 + 10 * (i + 1),
0),
eTextAlign.Align_Left, Color.Yellow, true, Color.Black);
}
text = string.Format("Video Center :{0:000.0000000}
{1:00.0000000} {2:###.000000}", ptArr[4].x, ptArr[4].y,
ptArr[4].z);
textPrinter.Print(text, new XVertex3d(10, 88, 0),
eTextAlign.Align_Left, Color.Yellow, true, Color.Black);
}
else
{
string text = string.Empty;
text = string.Format("No Metadata");
textPrinter.Print(text, new XVertex3d(10, 14, 0),
eTextAlign.Align_Left, Color.Yellow, true, Color.Black);
return true;
}
}
}
catch (System.Exception ex)
{
Console.WriteLine(ex);
}
return default(bool);
}](XDL_VideoView5.files/image005.png)