센서&소프트웨어
제품화분야 > 센서&소프트웨어 > XDL for Drone
XDL FOR DRONE
XDL for Drone(Development Library for the Unified Drone-Ground Systems)은 텔레메트리 정보가 포함된 동영상을 중심으로 하는 드론-지상시스템 통합 응용 서비스 개발을 위한 소프트웨어 개발 도구 패키지입니다. 센서모델 다중화 동영상 인코더를 포함한 임베디드 시스템 개발도구 XDL-E, 2/3차원 지도 전시와 상황 정보 중첩 도시, 위성/항공영상과 동영상 처리, 비행 시뮬레이션 제작을 지원하는 데스크톱 응용 프로그램 개발도구 XDL로 구성되어 있습니다.
지원환경
- 임베디드(드론) OS: GNU/Linux
- 지상시스템: MS Windows w/ .NET Framework OpenGL 2.1 or above (3.1 or above preferred)

드론-지상시스템 통합 서비스 환경
드론 시스템 : 센서모델 다중화 동영상 생성
XDL-E: MPEG-TS Encoder
- 카메라, 위치/자세 센서로부터 센서모델 메타데이터가 포함된 MPEG-TS 동영상 생성 및 전송
(MISB/STANAG 표준 준수) - 임베디드 시스템 성능을 고려한 가변 FPS로 실시간성 확보
- FFmpeg과 하드웨어 미디어 코덱을 이용한 가속 인코딩 지원
센서모델
초점거리 / 화각 (카메라제원)
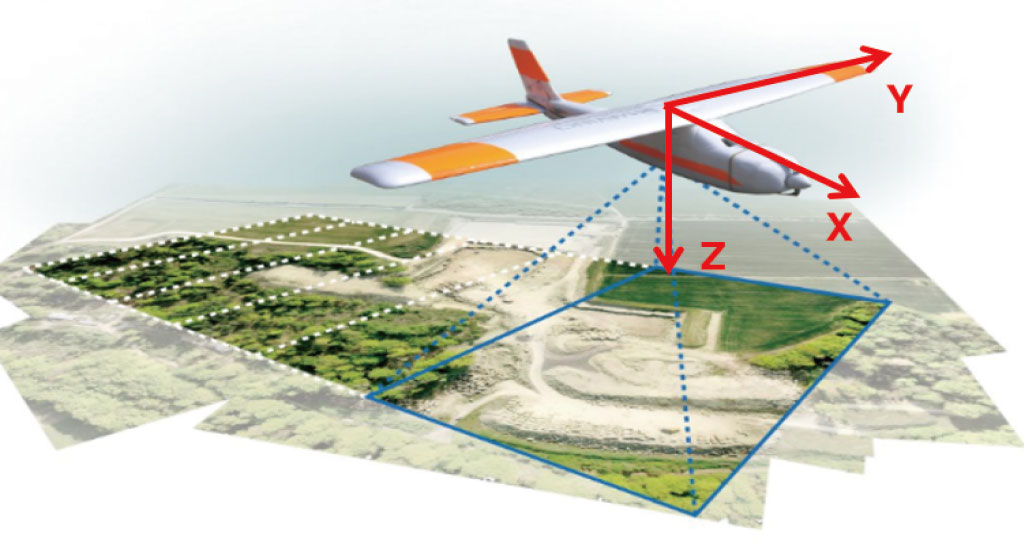
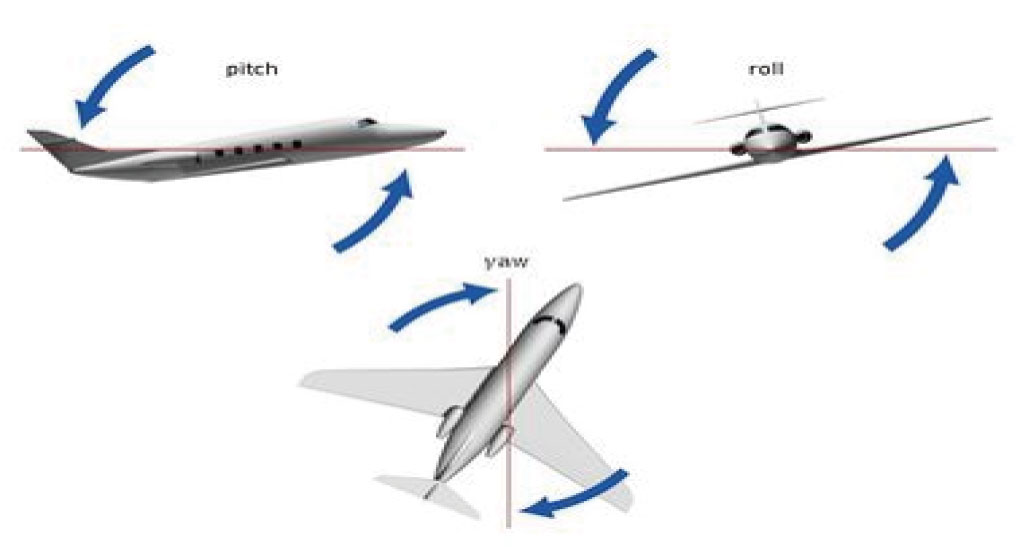
위치(GPS) + 자세(IMU/AHRS)
MPEG2 Transport Stream (TS) Container

Key-Length-Value (KLV) Metadata
MISB ST 0601 The Unmanned Air System (UAS) Datalink Local Set

 GNU Lesser General Public License (LGPL) version 2.1로 배포되는 FFmpeg을 수정 없이 정적 링크하여 사용합니다.
GNU Lesser General Public License (LGPL) version 2.1로 배포되는 FFmpeg을 수정 없이 정적 링크하여 사용합니다.
드론 시스템 적용 사례 (라즈베리 파이 장착)
![]()
- 하드웨어: Raspberry Pi 3 (Raspbian OS), Camera module v2
- FFmpeg과 MMAL을 이용한 하드웨어 가속 H.264 인코딩
- 드론 비행제어장치(FC)에서 MAVLink 프로토콜로 위치/자세 센서값 획득 (기체와 카메라의 상대 자세 및 짐벌 자세 추가)
- 무선인터넷(Wi-Fi)을 통한 MPEG2-TS 스트리밍 또는 파일 저장

(주)카스컴 개발용 드론

(주)휴인스 Blueye-1K
지상 응용 시스템: 센서모델 다중화 동영상 응용 서비스
위치 기반 모니터링
-
MPEG-TS 동영상 재생 및 MISB 표준 메타데이터 처리
-
2/3차원 지도 연동, 좌표 추출, 정보 표시
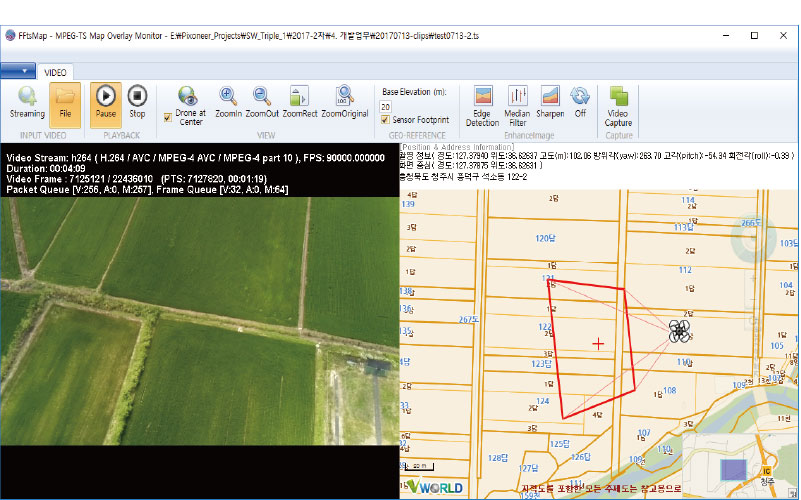
<동영상 재생 및 지적도 연동 모니터링>
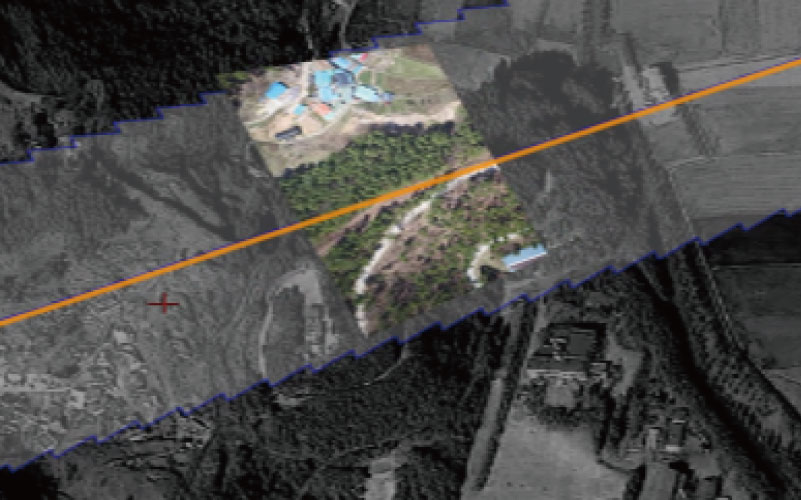
<영상 프레임 중첩>
비디오 영상처리 응용 서비스
-
동영상 이동물체 탐지 및 표적 위치 결정
-
실시간 모자이크 (영상 정합 + 센서모델링 활용)


