|
|
eSpatial
|
공간 필터링 방법을 열거한다.
Namespace: Pixoneer.NXDL.NRS
Assembly: NXDLrs (in NXDLrs.dll) Version: 3.0.0.4
C#
public enum eSpatialFilterMethod
| Member name | Value | Description |
|---|---|---|
| None | 0 | 필터를 적용하지 않음 |
| Average | 1 |
Average Filter는 영상을 부드럽게 하고 노이즈를 없앤다. 이 필터는 filter window에 포함되는 값들의 합을 filter window의 픽셀 개수로 나누어서 값을 계산한다. 예) Result = (a1 + a2 + a3 + a4+ ... + a9) / 9 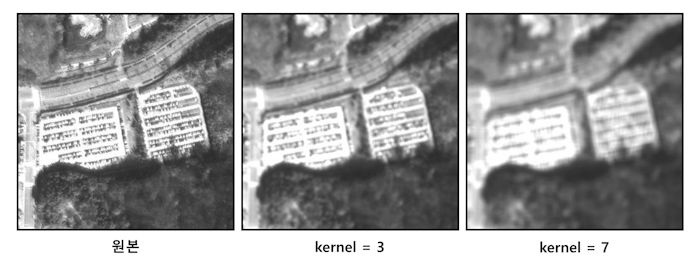 |
| Laplacian | 2 |
Laplacian Edge Detect Filter는 입력 영상의 에지를 강조한다. 이 필터는 방향에 무관하다. 영상에서 에지는 수치 화소값의 밝기가 급격히 변하는 지점에 존재한다는 점에 착안하여, 중앙 화소 지점에서의 기울기값을 이용하는 에지 강조 기법이 있으며, 이러한 기울기 연산자에는 소벨(Sobel), 로버츠(Robert), 프리윗(Prewitt) 등의 연산자가 있다. 기울기 연산자에 의한 에지 강조는 너무 많은 부분이 에지로서 추출되는 경향이 있다. 특히 넓은 지역에 걸쳐 완만한 경사를 보이는 경우 이러한 지역 모두가 에지로서 추출된다. 반면 라플라시안(Laplacian) 연산자는 기울기가 아니라 기울기의 변화율을 추출하므로 기울기가 일정한 지역은 에지로서 추출되지 않으며, 기울기가 변하는 지점들만이 에지로서 추출되게 된다. 이 필터가 사용하는 결과값을 계산하기 위한 (2n + 1) x (2n + 1) template 매트릭스 M 은 다음과 같다. 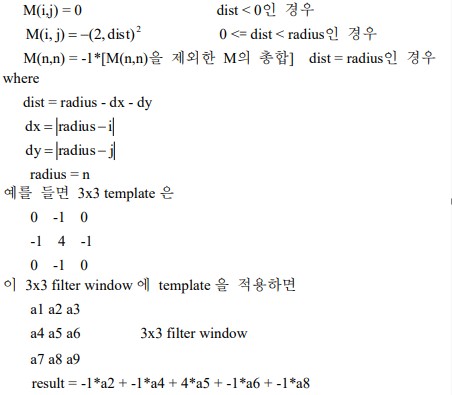 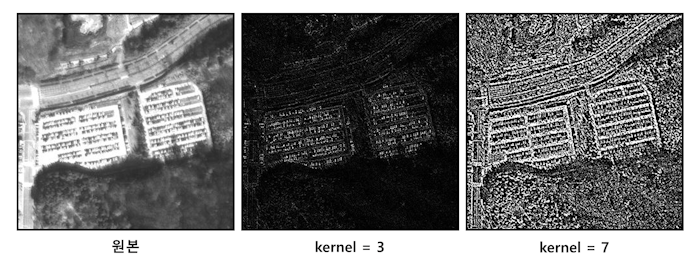 |
| Sobel | 3 |
Sobel Edge Detect Filter는 입력 영상의 에지를 강조한다. 이 필터는 Prewitt Edge Detect Filter의 개선형으로 기본적으로 수평, 수직 에지에 민감하다. 이 필터에서 가능한 커널의 크기는 3x3이다. 이 필터가 사용하는 결과값을 계산하기 위한 2 개의 3x3 template 은 다음과 같다. 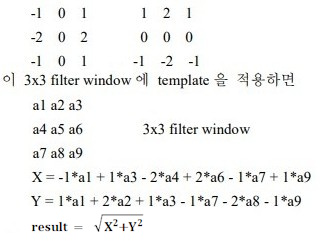 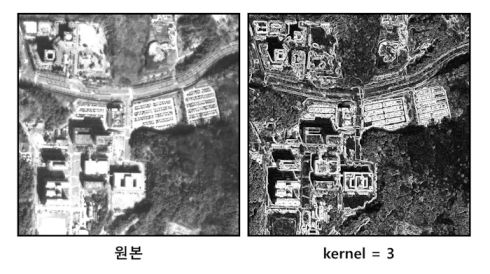 |
| Roberts | 4 |
Roberts Edge Detect Filter는 입력 영상의 에지(edge)를 강조한다. 이 필터의 Template는 다른 Edge Detect Filter의 Template보다 간단하지만 효과적이다. 이 필터는 잡음에 민감하며, 가능한 커널의 크기는 2x2이다. 이 필터가 사용하는 결과값을 계산하기 위한 2 개의 2x2 template 은 다음과 같다. 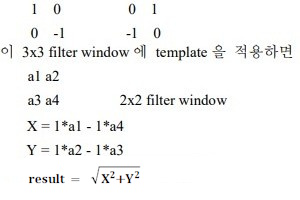 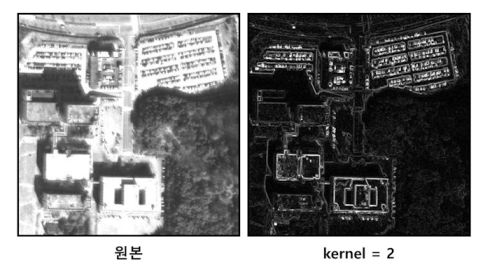 |
| Prewitt | 5 |
Prewitt Edge Detect Filter는 입력 영상의 에지(edge)를 강조한다. 이 필터의 Template는 대각 방향의 에지보다는 수평, 수직 에지에 민감하다. 이 필터에서 가능한 커널의 크기는 3x3이다. 이 필터가 사용하는 결과값을 계산하기 위한 2 개의 3x3 template 은 다음과 같다. 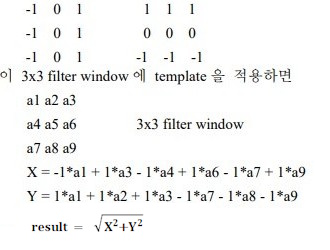 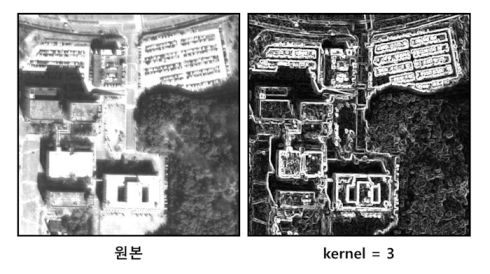 |
| EdgeSharpen | 6 |
Edge Sharpening Filter는 영상의 고주파 성분을 강조하여 에지를 추출하는 기능을 갖는다. 이 필터는 영상에 Average Filter를 적용한 후 이 영상에 원본 영상을 뺀 결과를 얻는다. 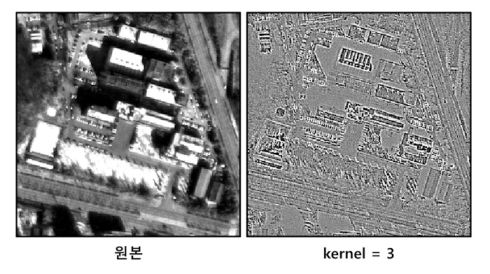 |
| Median | 7 |
Median Filter는 영상을 부드럽게 하면서 가장자리 값을 보존하는 기능을 갖는다. Average Filter나 Gaussian Smoothing Filter는 일종의 low-pass filter로서 영상 자료에 포함된 잡음을 제거하기 위하여 흔히 이용된다. 그러나 이러한 low-pass filter들은 잡음뿐 아니라 경계선등의 고주파 신호도 함께 제거하는 경향이 있다. Median Filter는 커널내의 수치 화소값들을 크기순으로 정렬한 후 중앙에 위치하는 값으로서 커널 중심의 수치 화소값을 설정하는 필터로서, 경계선등의 고주파 신호를 비교적 잘 보존하면서 잡음을 제거할 수 있는 필터이다. 다른 low-pass filter들에 비하여 비교적 경계가 잘 보전되며, 잡음이 강한 자료에 특히 효과적이다. 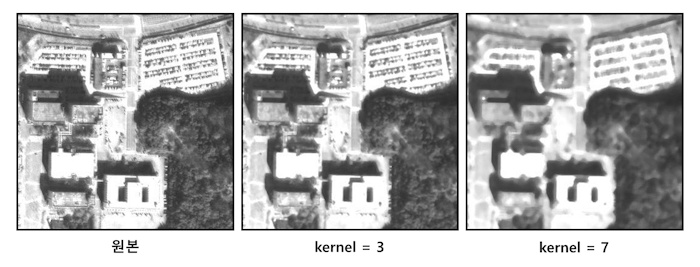 |
| Mode | 8 |
Mode Filter는 filter window 내의 최고 빈도값을 계산한다. Mode Filter는 커널내의 각 수치 화소값들의 빈도를 계산해서 가장 많은 빈도수를 보이는 수치 화소값을 커널의 중앙에 위치한 화소의 수치 화소값으로 결정하는 필터이다. 다른 low-pass filter에 비하여 비교적 경계를 잘 보전하며 잡음이 강한 영상에 효과적이다. 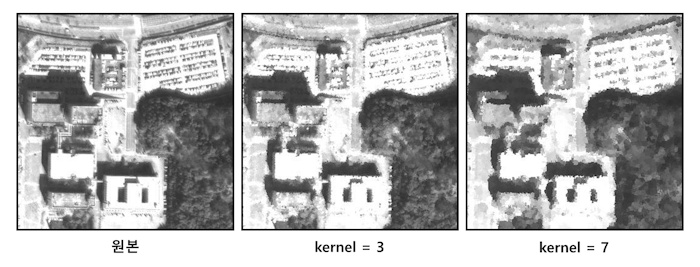 |
| LeeAdd | 101 |
Lee[Additive] Filter는 에지와 같은 고주파의 특징들은 보존하는 반면 고주파 노이즈를 제거하기 위하여 레이더 데이터에 주로 적용된다.
결과값은 filter window의 픽셀 값들을 이용하여 다음의 식을 통해 계산된다.   |
| LeeMul | 102 |
Lee[Multiplicative] Filter는 에지와 같은 고주파의 특징들은 보존하는 반면 고주파 노이즈를 제거하기 위하여 레이더 데이터에 주로 적용된다.
결과값은 filter window의 픽셀 값들을 이용하여 다음의 식을 통해 계산된다.   |
| LeeAddMul | 103 |
Lee[Additive and Multiplicative] Filter는 에지와 같은 고주파의 특징들은 보존하는 반면 고주파 노이즈를 제거하기 위하여 레이더 데이터에 주로 적용된다.
결과값은 filter window의 픽셀 값들을 이용하여 다음의 식을 통해 계산된다. 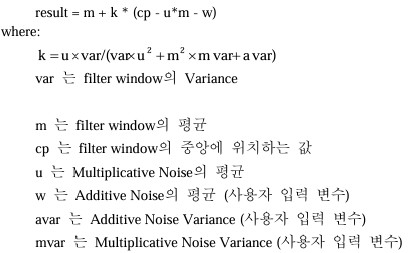 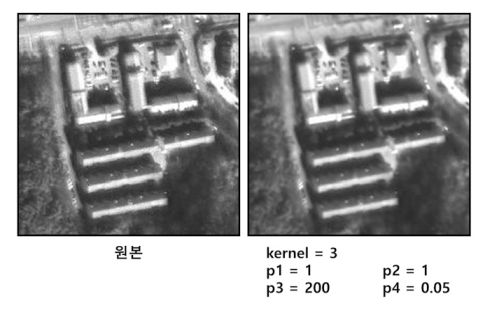 |
| Lee_Enhance | 104 |
Enhanced Lee Filter는 에지와 같은 고주파의 특징들은 보존하는 반면 고주파 노이즈를 제거하기 위하여 레이더 데이터에 주로 적용된다.
결과값은 filter window의 픽셀 값들을 이용하여 다음의 식을 통해 계산된다. 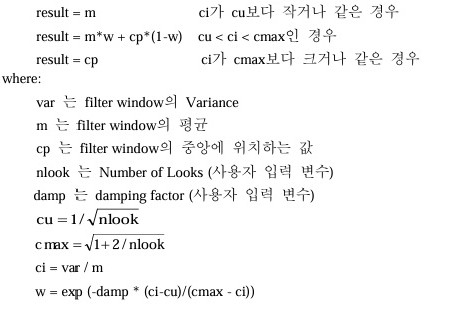 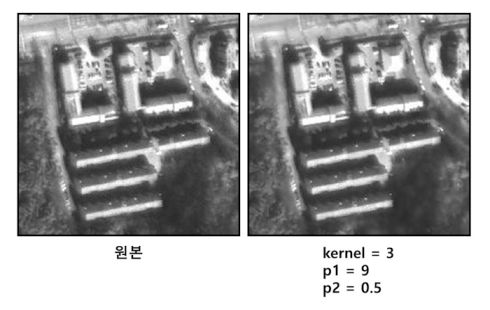 |
| Frost | 105 |
Frost Filter는 에지와 같은 고주파의 특징들은 보존하는 반면 고주파 노이즈를 제거하기 위하여 레이더 데이터에 주로 적용된다.
각 픽셀값은 filter window의 픽셀 값들을 이용하여 다음과 같은 방법을 통해 계산된다. 우선 filter window 의 각 픽셀들에 대해 weighting values, W를 구한다. 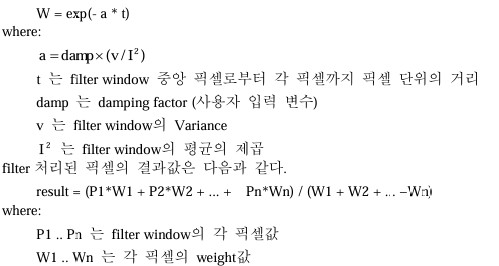 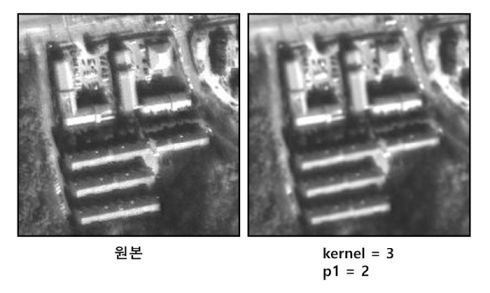 |
| FrostEnhance | 106 |
Enhanced Frost Filter는 에지와 같은 고주파의 특징들은 보존하는 반면 고주파 노이즈를 제거하기 위하여 레이더 데이터에 주로 적용된다.
각 픽셀값은 filter window의 픽셀 값들을 이용하여 다음과 같은 방법을 통해 계산된다. 우선 filter window 의 각 픽셀들에 대해 weighting values, W를 구한다. 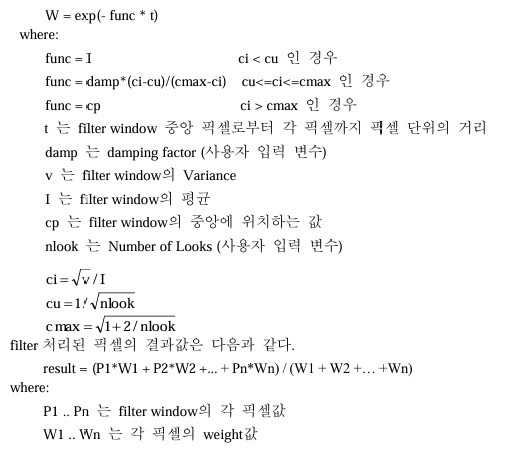 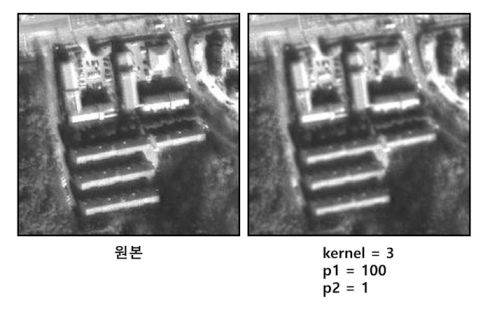 |
| Gamma | 107 |
Gamma Filter는 에지와 같은 고주파의 특징들은 보존하는 반면 고주파 노이즈를 제거하기 위하여 레이더 데이터에 주로 적용된다.
결과값은 filter window의 픽셀 값들을 이용하여 다음의 식을 통해 계산된다. 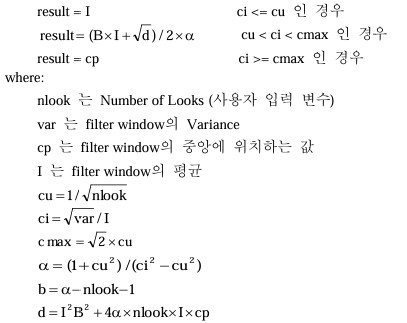 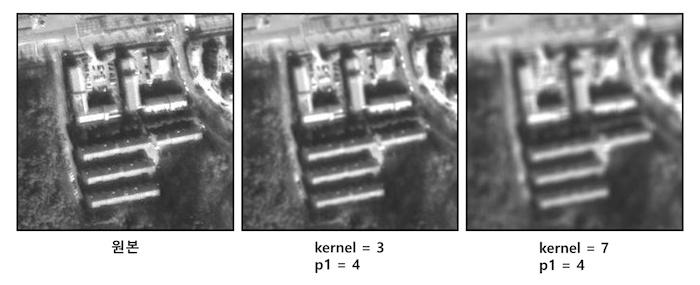 |
| Kuan | 108 |
Kuan Filter는 에지와 같은 고주파의 특징들은 보존하는 반면 고주파 노이즈를 제거하기 위하여 레이더 데이터에 주로 적용된다.
결과값은 filter window의 픽셀 값들을 이용하여 다음의 식을 통해 계산된다. 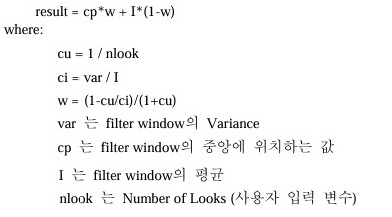 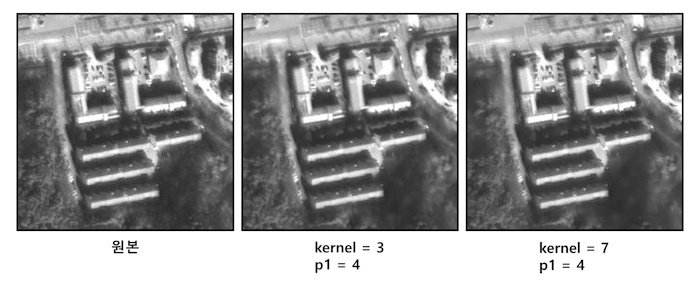 |
| GaussianSmooth | 109 |
Gaussian Smoothing Filter는 low-pass filter로서 Sigma값을 조절하여 영상을 흐리게 하는 작업을 수행한다. 2D 가우시안 함수(정규분포)를 기반으로 한다.
  |
| SaltPepper | 110 |
Salt and Pepper Removal Filter는 디지털 데이터에서 나타나는 무작위의 노이즈를 효과적으로 처리하는 작업을 수행한다.
결과값은 filter window의 픽셀 값들을 이용하여 다음의 식을 통해 계산된다. 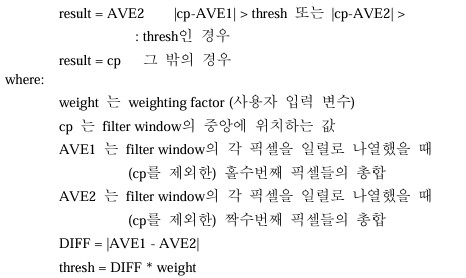 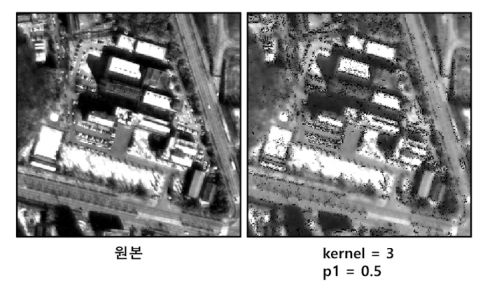 |
| UnsharpMask | 111 | Unsharp Mask Filter는 High-Pass 영상(원본 영상과 부드러워진 영상(Gaussian Smoothing)의 차이)을 일정비율 곱해서 원본영상에 더하여 계산한다.
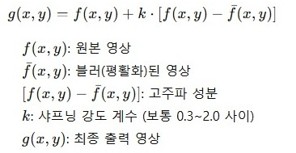 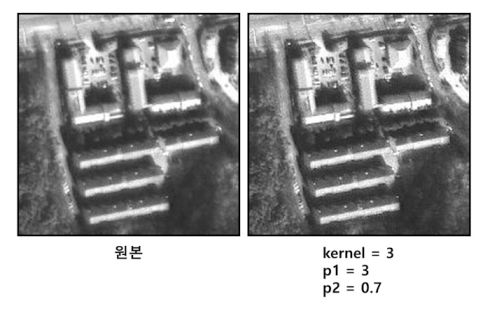 |
| OccurAverage | 201 | Occurrence[Average] Filter는 filter window의 각 픽셀들의 평균값을 결과값으로 계산한다.   |
| OccrStdev | 202 |
Occurrence[Standard Deviation] Filter는 filter window의 각 픽셀들의 표준 편차를 결과값으로 계산한다. 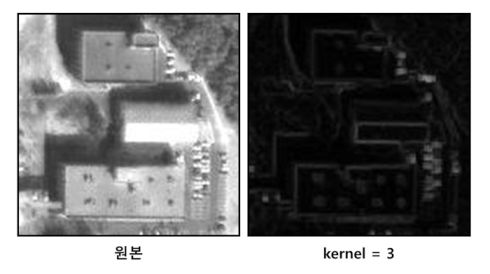 |
| OccrEntropy | 203 |
Occurrence[Entropy] Filter는 filter window의 각 픽셀 분포의 entropy를 결과값으로 계산한다. 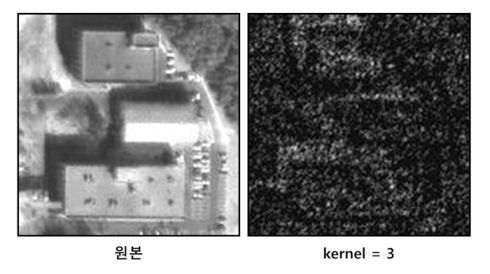 |
| OccurMinMax | 204 |
Occurrence[Min-Max] Filter는 filter window의 각 픽셀들 최고값과 최솟값의 차를 결과값으로 계산한다.  |
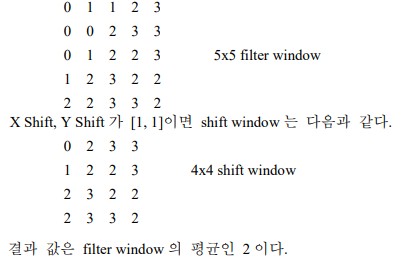
| CooccurAverage | 205 |
Co-occurrence[Average] Filter는 사용자 입력변수 X Shift, Y Shift만큼 filter window를 오른쪽과 아래쪽 방향으로 이동한 shift window를 이용하여 shift window 각 픽셀의 평균값을 결과값으로 계산한다.
  |
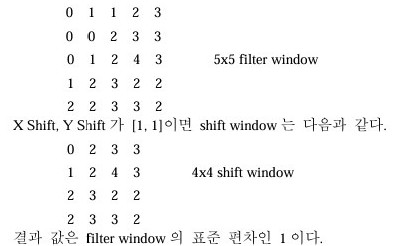
| CooccurStdev | 206 |
Co-occurrence[Standard Deviation] Filter는 사용자 입력변수 X Shift, Y Shift만큼 filter window를 오른쪽과 아래쪽 방향으로 이동한 shift window를 이용하여 shift window 각 픽셀의 표준편차를 결과값으로 계산한다.
 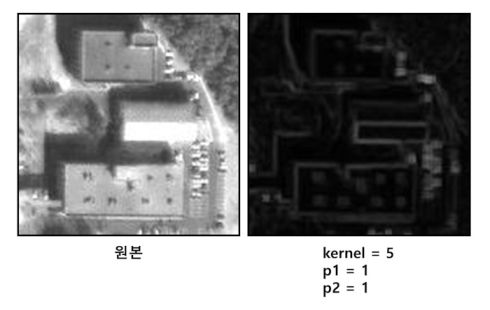 |
| CooccurAngularsm | 207 |
Co-occurrence[Angular Second Moment] Filter는 사용자 입력변수 X Shift, Y Shift만큼 filter window를 오른쪽과 아래쪽 방향으로 이동한 shift window를 얻는다. 이 두 window를 통해 Co-occurrence Matrix를 계산하고 이 Matrix를 이용하여 결과값을 얻는다.
# 그림 1 [예제] 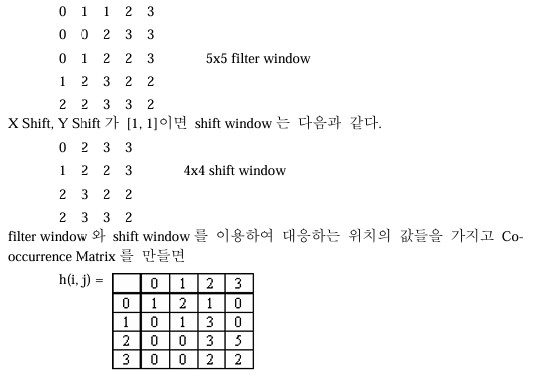 # 결과  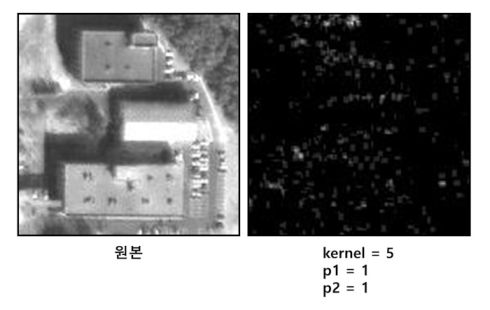 |
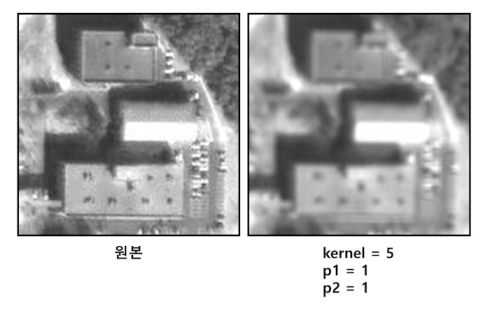
| CooccurContrast | 208 |
Co-occurrence[Contrast] Filter는 사용자 입력변수 X Shift, Y Shift만큼 filter window를 오른쪽과 아래쪽 방향으로 이동한 shift window를 얻는다. 이 두 window를 통해 Co-occurrence Matrix를 계산하고 이 Matrix를 이용하여 결과값을 얻는다.
# 그림 1 [예제] 참고 # 결과  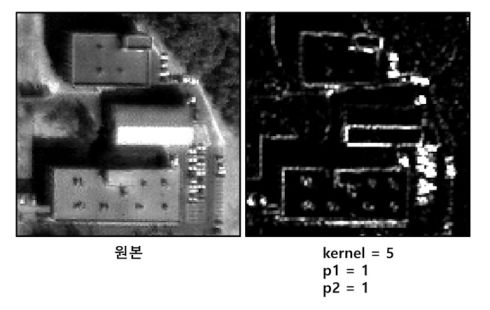 |
| CooccurCorrelation | 209 |
Co-occurrence[Correlation] Filter는 사용자 입력변수 X Shift, Y Shift만큼 filter window를 오른쪽과 아래쪽 방향으로 이동한 shift window를 얻는다. 이 두 window를 통해 Co-occurrence Matrix를 계산하고 이 Matrix를 이용하여 결과값을 얻는다.
# 그림 1 [예제] 참고 # 결과  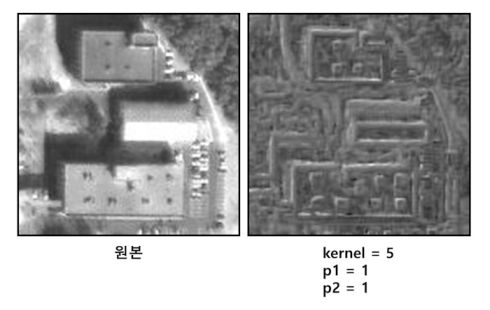 |
| MorphologyDilate | 301 |
Morphology Filter(Dilate)는 객체 내부의 작은 구멍을 채우고 근접한 위치의 두 객체를 연결한다. filter window내의 화소값 중 가장 큰 값을 출력값으로 결정한다.  |
| MorphologyErode | 302 |
Morphology Filter(Erode)는 경계를 침식해서 작은 돌기를 제거한다. filter window내의 화소값 중 가장 작은 값을 출력값으로 결정한다.  |
| MorphologyOpen | 303 |
Morphology Filter(Open)은 침식 연산(erosion)을 수행한 후 다시 팽창(dilation) 연산을 수행한다. 작은 크기의 객체에 포함되는 픽셀을 제거한다.  |
| MorphologyClose | 304 |
Morphology Filter(Open)은 팽창 연산(dilation)을 수행한 후 다시 침식(erosion) 연산을 수행한다. 객체 내부의 작은 구멍이나 간격을 채운다. 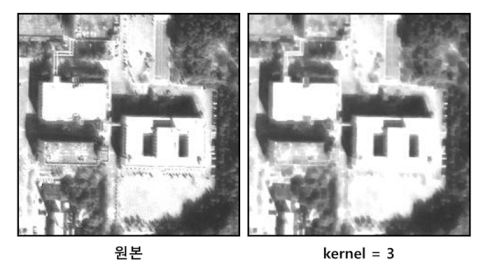 |
| NonLocalMean | 401 |
Non Local Mean Filter는 영상 내에서 유사한 패턴을 찾아 평균화함으로써 노이즈를 제거한다.
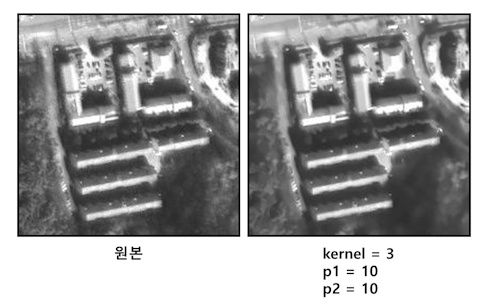 |
| RollingGuidance | 402 |
Rolling Guidance 필터는 영상의 세부적인 질감이나 노이즈는 제거하면서 큰 구조의 경계는 복원/보존한다.
입력 영상 -> Gaussian Blur -> 초기 Guidance 생성 -> Joint Bilateral Filtering 반복 -> 최종 Edge-Preserving 결과 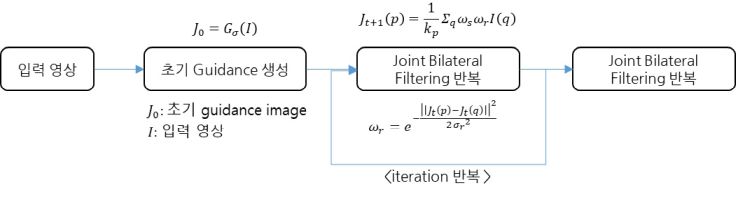 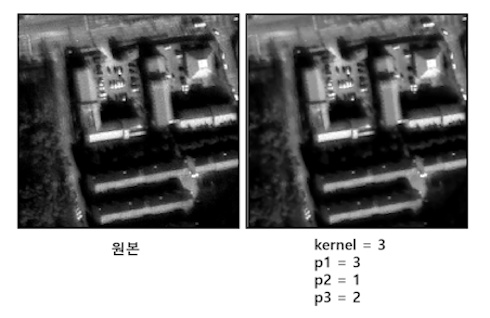 |
| UserDef | 999 |
사용자 정의 kernel을 이용하여 필터를 적용한다. 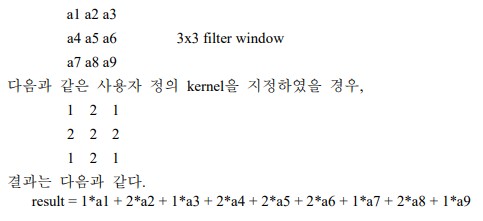 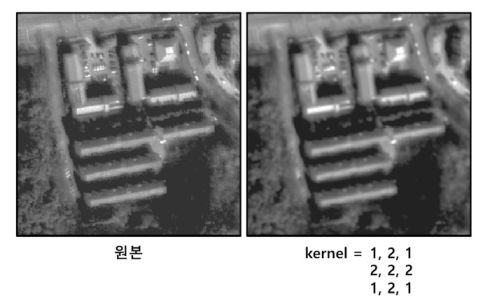 |